Input recordings
Take a single-view monocular GoPro video of tennis swing demo
Shape and pose evolution over time.
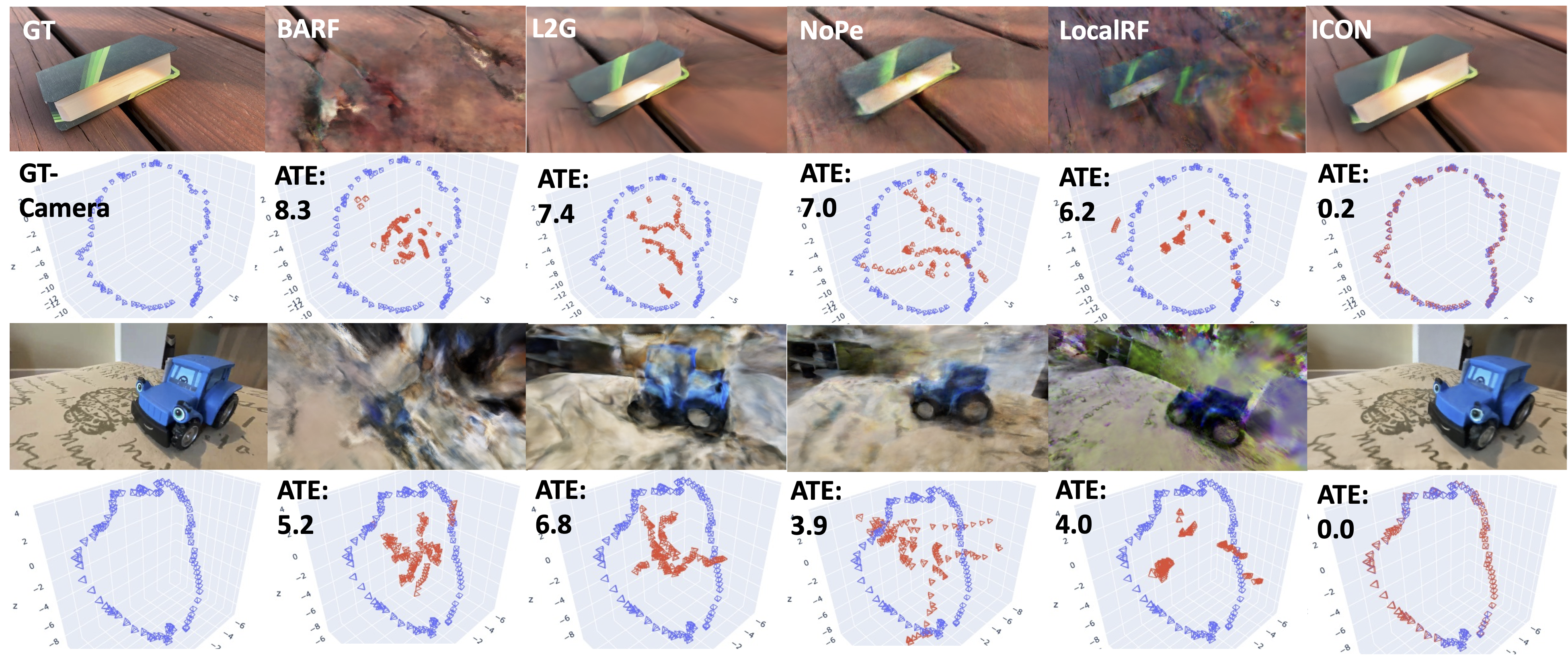
Neural Radiance Fields (NeRF) exhibit remarkable performance for Novel View Synthesis (NVS) given a set of 2D images. However, NeRF training requires accurate camera pose for each input view, typically obtained by Structure-from-Motion (SfM) pipelines. Recent works have attempted to relax this constraint, but they still often rely on decent initial poses which they can refine. Here we aim at removing the requirement for pose initialization. We present Incremental CONfidence (ICON), an optimization procedure for training NeRFs from 2D video frames. ICON only assumes smooth camera motion to estimate initial guess for poses. Further, ICON introduces "confidence": an adaptive measure of model quality used to dynamically reweight gradients. ICON relies on high-confidence poses to learn NeRF, and high-confidence 3D structure (as encoded by NeRF) to learn poses. We show that ICON, without prior pose initialization, achieves superior performance in both CO3D and HO3D versus methods which use SfM pose.
Insert paper presentation video. It's fine if we don't have it now.
Take a single-view monocular GoPro video of tennis swing demo
ICON predicts accurate racket poses
Completes out-of-view part of the racket
Turns racket into 3D mesh asset
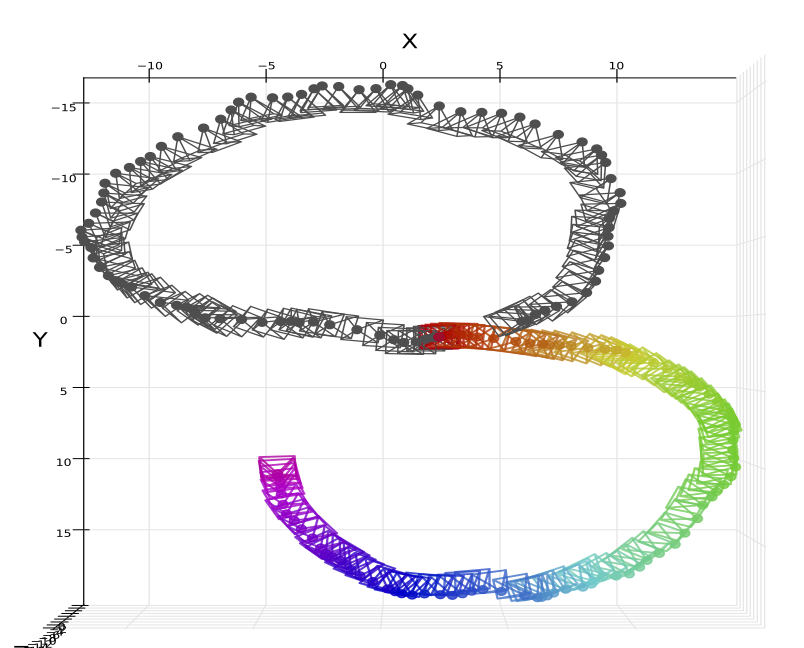
Trajectory is inverted by 180 degree along z-axis
A concave appled inside the table.
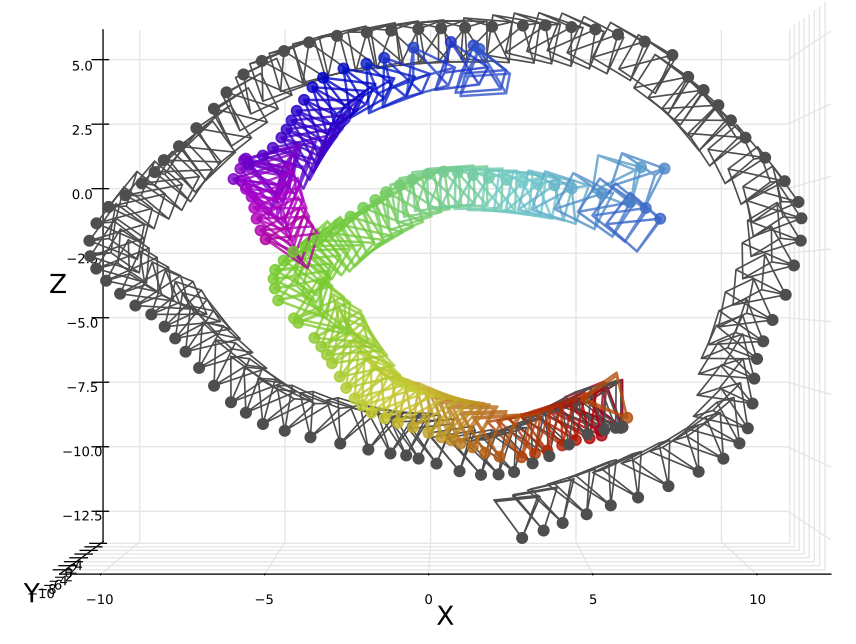
Pose and NeRF break apart, producing sepa- rate, mutually invisible radiance fields.
A tube of stacked toytrucks that the camera flies through like a flipbook
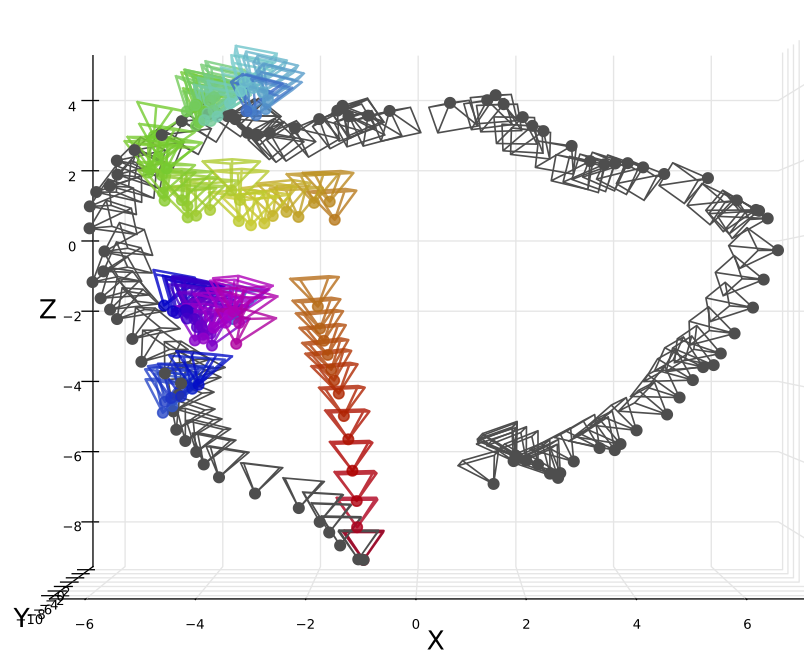
Two subsets of the pose trajectory are trapped in a local minimum, incorrectly observing the same part of the radiance field, leading to blurry rendering and empty voxels.
One side of the toaster is blurry due to over- lapping views, while the other has no views and is vacant.
@article{wang2024icon,
title={ICON: Incremental CONfidence for Joint Pose and Radiance Field Optimization},
author={Wang, Weiyao and Gleize, Pierre and Tang, Hao and Chen, Xingyu and Liang, Kevin J and Feiszli, Matt},
journal={CVPR},
year={2024}
}